| 智能电气阀门系统控制优化方法研究 | |
| 来源:哲成阀门 作者:哲成阀门贸易部 发布时间:2014-6-15 阅读:次 | |
| 随着科学计算的发展,工业生产的自动化技术也不断提高,调节阀作为电气自动控制系统中的重要部分,其性能的高低和总体电气控制系统的控制精度以及产品质量具有较强的关联性。阀门定位器是智能电气阀的关键部件,其能够有效解决阀杆的摩擦力以及介质的不均衡干扰,进而提高调节阀的控制效率和准确性。阀门定位器在工业生产中具有重要的作用,随着过程控制技术的发展,定位器的性能也应逐渐增强。当前越来越多的公司,如ABB、FISHER公司等生产出了智能化的电气阀门定位器,这些智能定位器具有自主化、简便化等优势。
当前的智能电气阀门定位器大都依据力平衡理论进行设计。通过重复调整不同的弹簧螺钉实现力均衡,最终对流量进行有效的控制。电气定位器的结构较为单一,并且容易受到温度、振动变化的干扰,对安装检修技术的要求较高;并且需要对定位器零点,以及行程进行多次调整。智能电气阀门定位器控制模型,需要操作人员现场对部件的气腔体积、气源的变化性、电气转换模块的非线性等参数进行调整,存在效率低、误差大以及时间滞后等问题。因此,需要新一代的智能电气阀门定位器解决这些问题。 1 智能电气阀门定位器工作原理分析 智能阀门定位器主要用于调控控制阀,采集控制器输出的电流控制信号,通过气压信号调控阀门。调控阀产生动作后,阀杆会产生一定的位移,并将相关的信号传递到阀门定位器。定位器对输入控制信号和阀位反馈信号进行对比分析,如果两种信号不同,则促使阀门的驱动部件进行工作,直至两种信号相同为止。如果两种信号相同,则驱动部件不会对阀位进行调节。智能电气阀门定位器具有控制精度高、自主分析性强、效率高等优势。 智能电气阀门定位器的工作原理用图1描述,关键的控制电路是单片机,其可采集控制器的阀门开度信号(4~20mA),获取该信号同实际的开度反馈信号差,按照该信号差的方向以及大小产生电压信号并对电气动放大器PV1以及PV2进行控制。
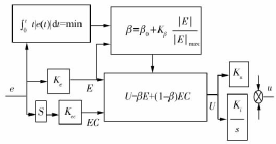
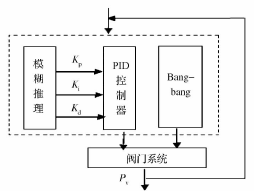
图1 智能电气阀门定位器原理图 随着电子技术的不断发展,单片机的集成度也不断增强,进而提高总体部件的运行效率和准确性;以单片机为基础的系统中主要采用PID控制算法完成定位控制;但是随着设备复杂程度的增加,这种控制方法的弊端逐渐显现。主要是由于气压经过单向阀A以及B的开关对阀门膜头的进气以及出气量进行调控,促使阀芯的位置发生变化,从而对气氛的开度进行适当的调控,实现阀门的准确定位。如果正信号误差较大,则产生的一系列信号将会导致单向阀A快速开启,单向阀B闭合,使得阀门膜头的气压增加,否则负信号误差较大时,产生的信号使得阀快速A闭合,阀B快速开启,使得阀门膜头气压降低,惯性增大。如果信号差是零,则产生的信号使得阀A和B都闭合,此时阀门膜头气压的稳定性被破坏,形成控制信号模糊化,控制超调现象,影响控制精度。 2 改进的动态自主PID控制方法 由于误差的存在,导致传统的PID控制过程存在过控制现象。本文在传统的控制方法基础上,提出了一种基于融合去模糊化的PID控制方法。 2.1 去除动态PID信号模糊性 在传统的PID控制中,由于误差的存在,使得控制信号存在模糊性,为了去除这种模糊性,可设置动态PID控制器系统的误差是E,系统误差表达式为e(t)、误差波动率EC,表达式为e(t),K为调节系数,可得: 则能够得到融合改进调整函数的控制律是: U=βE+(1-β)EC (3) 式(3)中,β表示相应的比例系数,式(2)中Kec(t)表示微分系数,进而能够获取调整函数是 β=β0+Kβ|E‖E|max (4) 式(4)中,β0用于描述|E|时调整因子,0≤β≤0.5,0≤β≤1,Kβ是常数0≤Kβ≤(1-β0)。 式(4)能够依据误差的大小自主调控误差以及误差的波动性对控制作用的权重。融合改进调整函数的动态PID控制器的结构图用图2描述。
图2 融合改进调整函数的动态PID控制器 通过图2所示控制器能够对调整函数进行在线自主调控,误差e同u间的控制规范具有动态性,误差e同控制u间的控制规范是一种动态的PID控制规范。 依据相关的控制经验可得,Δkp、Δki、Δkd的波动范围分别是(-0.4,0.4)、(-0.08,0.08)、(-0.25,0.25),需要将这些参量归一化到范围(-5,5)中。设置系统e’,ec’,Δkp、Δki、Δkd的波动区域是模糊集的论域是e’,ec’,Δkp、Δki、Δkd={-5,-4,-3,-2,-1,0,1,2,3,4,5}模糊子集是e’,ec’,Δkp、Δki、Δkd={NB,NM,NS,O,PS,PM,PB},按照相关的控制经验可塑造Δkp、Δki、Δkd的模糊标准表,设置e’,ec’,Δkp、Δki、Δkd满足正态分布,明确论域中不同元素对模糊变量的隶属度,建立模糊控制表。利用重心法去模糊化,获得PID参数的修正值,采用查询表的方式在微控器中实现。 对上述分析的控制器参数e’、ec’、Δkp,Δki,Δkd,如果只通过人工方法无法获取这些参数的最优组合,通过改进方法能够获取这些参数的取值。通常将时间同绝对误差的积作为分析控制器参数性能的指标函数,则有: 式(6)中,J用于描述误差加权时间后的积分面积大小,其可描述系统的响应效率、控制时间以及超调量的大小,并且能够降低系统的波动性。通常可采用式(6)描述的指标对控制器参数e’、ec’、Δkp、Δki、Δkd进行寻优,依据性能指标规范,对控制器参数进行调整,最终获取最佳的组合值。通过上述分析的指标函数能够及时调整函数β,并且需要改进β0以及Kβ两个参数,依据如下规范对其进行寻优:0≤β0≤0.5,0≤Kβ≤(1-β00≤Kβ≤(1-β0),最终完成对控制器参数的优化,通过最优的智能电气阀门定位器控制参数组合,实现对控制器数据信号的准确调控。 2.2 模糊消除后的PID控制过程 在消除模糊性后,PID自整定通过积分的继电途径,控制系统输入频率、幅度以及设置好的三角波信号。并且系统的输出振动规范要求如式(7)所示。 μ90位置的频率响应幅值是 能够获取PID控制参数是 式(9)中,通过测量输出信号峰值能够获取振幅a,测量系统输出通过工作点的两次时间能够获取周期T,d用于描述三角波峰值同半周期的比值。本文设置的阀门控制系统的相位裕度φm为30°~50°,幅值裕度Am为2~5。 智能电气阀门定位器系统运行时,气源压力和压电陶瓷阀具有多样性和随机性,因而要求系统的控制参数能够依据系统的实际情况,及时进行调整。自适应调控器结构用图3描述。
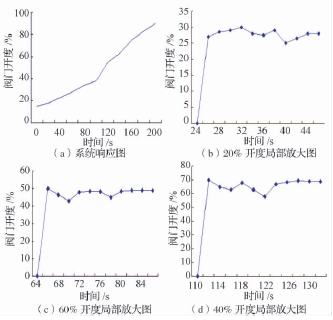
图3 自适应控制器结构 并将系统消除模糊性后,得到的相应误差划分成15%之内和之外两部分,如果系统输出大于设置值的15%误差带,则进行Bang-bang控制,打开(关闭)压电比例阀,全速放气(充气),增强系统的定位效率。如果系统误差小于15%误差带,需要对系统进行自适应PID控制,将误差e以及误差波动率ec当成算法的输入,通过模糊规范后的PID参数对系统数据进行及时控制,采用12位A/D采样将输入以及反馈转化成量化值0~(212-1),最终使得e处于0~4095之中,ec处于0~2000之中,实现e以及ec的量化值归一化操作。 3 实验结果 为了验证本文设计方法的有效性,需要进行相关的实验。实验系统包括4~20mA的电流输入源、智能阀门定位器硬件、直行程气动运行器以及信号收集卡。系统输入是电流,通过单片机采集数据,运算输出电压,并且调控压电陶瓷进行充气或放气,进而使得气动运行器的位置发生改变,实现对阀门的准确定位,通过数据收集卡将实时数据传送到计算机中。 实验规定系统气动运行器的运行类型是直行程,阀门流量特性是直线流量特征,设置系统的相位裕度φm=45°,幅值裕度Am=2,通过式(5)能够得到PID控制参数的原始值kp=1.4064,ki=0.230,kd=0.8527。最终获取本文方法和传统的PID方法的响应曲线用图4、图5描述,其中(a)用于描述周期性添加输入电流得到的响应曲线,(b)、(c)、(d)分别用于描述阀门开度在20%、40%、60%时的局部控制点精度放大图。
图4 本文方法的响应曲线
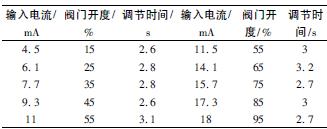
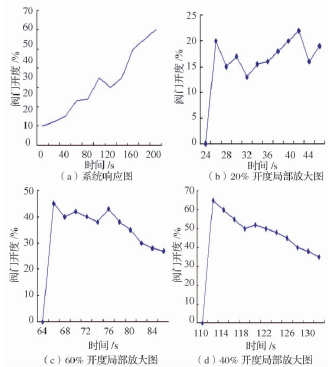
图5 传统PID方法的响应曲线 图4描述了本文方法具有较强的稳定性,能够对系统的超调性进行及时的处理,并且相应的超调量低于2%,持续的时间是4s。与传统的图5对比,可以看出,本文的方法在不同开度的情况下,控制精度有了较为明显的提升。 系统输入递增1.6mA时的控制时间用表1描述。 表1 系统控制时间
分析表1可得,本文设计的系统对不同的输入电流的调节时间都在相关的阀值内,能够对系统的信号进行及时的控制,解决了传统控制方法存在的时间滞后性问题,有利于对定位器信号进行准确的控制。 4 结论 本文提出了一种智能电气阀门定位器控制系统的优化设计方法,在综合分析智能电气阀门定位器的硬件结构基础上,采用改进的动态PID控制方法对定位器的信号进行有效的控制,该方法能够对阀门运行过程中的相关参数进行自主调整和优化,进而实现对阀门位置的准确控制,增强智能电气定位器控制的效率以及智能化。通过最终的实验结果说明,本文设计的系统能够对电气阀门定位器的实时自主控制,具有较强的稳定性,能够对系统的超调性进行及时的处理,取得了令人满意的结果。 |
|
| 本文Tag:智能、电气阀门、系统、控制、方法、研究 | |
|
本站推荐:
|
相关资讯:
|
温州哲成自控是国内专业的调节阀(气动/电动)、控制阀、自力式调节阀、气动截止阀、波纹管调节阀、气动切断阀专业厂家,欢迎新老客户来电咨询!
销售热线:0577-67980928 传真:0577-67980938 手机:18968997360 13736975604 邮箱:zczkvalve@163.com
厂址:浙江省温州市永嘉县五星工业区 国家工业和信息化部 备案/许可证编号为:浙ICP备14005643号 网站导航
 (1)
(1) (2)
(2)
 (5)
(5) (6)
(6) (7)
(7) (8)
(8) (9)
(9)
 (10)
(10)